Nanodegree Robotic Engineer
August 30, 2021 2026-03-13 8:59Nanodegree Robotic Engineer
Advanced
Robotic Software Engineer Specialization
The Robotics Software Engineer Specialization program focuses on teaching the core robotics skills needed for a successful robotics software engineering career.
Included with – BAI Plus
Robotic to drive your earnings
+$27K
Average salary increase of software engineering students who provided pre- and post-course salaries
September 2022
In this robotic engineering bootcamp you will:
Meet the growing demand for robotic and master the job-ready skills that will take your career to new heights.
Get an edge with human support
Work with a mentor, career coach, and more. They have your back and will hold you accountable.
Verify skills mastery
Project review cycle creates a feedback loop with multiple opportunities for improvement—until the concept is mastered.
Verify skills mastery
Learning accelerates as skilled mentors identify areas of achievement and potential for growth.
What will you learn
You will graduate from this Nanodegree program having completed five hands-on robotics projects in the Gazebo simulator; these will serve as portfolio pieces demonstrating your acquired skills to hiring managers and recruiters. These skills will help you pursue and advance a career in the robotics field.
PREREQUISITES FOR ENROLLMENT
To succeed in this Nanodegree program, you should have experience with the following:
• Advanced knowledge in any object-oriented programming language,
• preferably C++
• Intermediate Probability
• Intermediate Calculus
• Intermediate Linear Algebra
• Basic Linux Command Lines
Complete this courses:
Gazebo World
Learn how to simulate your first robotic environment with Gazebo, the most common simulation engine
used by Roboticists around the world.
Course Project Build My World
Use the tools that you’ve learned in Gazebo to build your first
environment.
Key Skills Demonstrated:
• Launching a Gazebo Environment
• Designing in Gazebo
ROS Essentials
Discover how ROS provides a flexible and unified software environment for developing robots in a modular and reusable manner. Learn how to manage existing ROS packages within a project, and how to write ROS Nodes of your own in C++.
Course Project Go Chase It!
Demonstrate your proficiency with ROS, C++, and Gazebo by building a ball-chasing robot. You will first design a robot inside Gazebo, house it in the world you have built in the Build My World project, and code a C++ node in ROS to chase yellow balls.
Key Skills Demonstrated:
• Building Catkin Workspaces
• ROS node creation
• ROS node communication
• Using additional ROS packages
• Gazebo world integration
• Additional C++ practice
• RViz Integration
Perception
You will learn:
Introduction to 3D Perception
Calibration, Filtering, and Segmentation
Clustering for Segmentation
Object Recognition
3D Perception Project
Introduction to Controls
You will learn:
Quadrotor Control using PID
Explores Swarm Robotics
Intro to Neural Networks
You will learn:
TensorFlow for Deep Learning
Deep Neural Networks
Convolutional Neural Networks
Fully Convolutional Networks
Lab Semantic Segmentation
Introduction to C++ for Robotics
You will learn:
Introduction to Term 2
The Jetson TX2
Interacting with Robotics Hardware
Lab Hardware Hello World
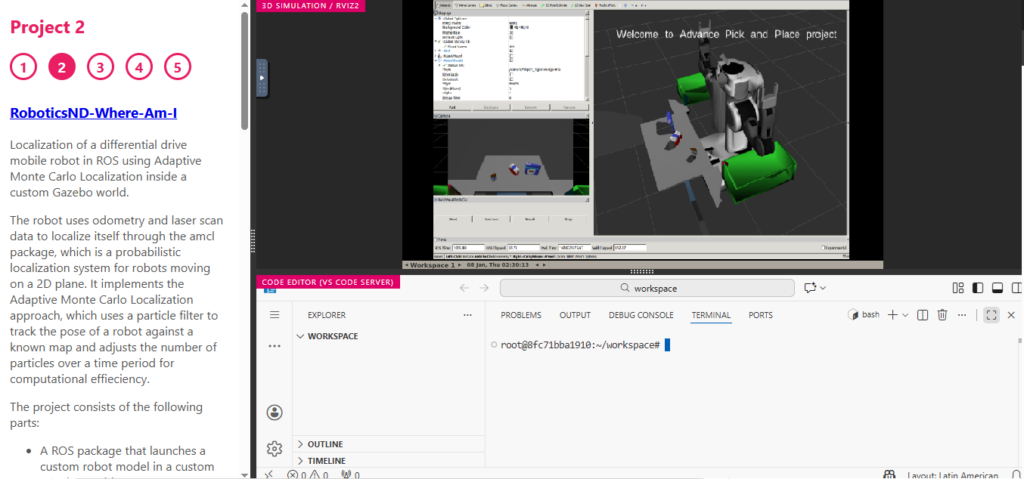
Localization
Learn how Gaussian filters can be used to estimate noisy sensor readings, and how to estimate a robot’s position relative to a known map of the environment with Monte Carlo Localization (MCL).
Course Project
Where Am I?
You will interface your own mobile robot with the Adaptive Monte Carlo Localization algorithm in ROS to estimate your robot’s position as it travels through a predefined set of waypoints. You’ll also tune
different parameters to increase the localization efficiency of the robot.
Key Skills Demonstrated:
• Implementation of Adaptive Monte Carlo Localization in ROS
• Understanding of tuning parameters required
Mapping and SLAM
Learn how to create a Simultaneous Localization and Mapping (SLAM) implementation with ROS packages and C++. You’ll achieve this by combining mapping algorithms with what you learned in the localization lessons.
Course Project
Map My World
Students will interface their robot with an RTAB Map ROS package to localize it and build 2D and 3D maps of their environment. Students must put all the pieces together properly to launch the robot and then teleop it to map its environment.
Key Skills Demonstrated:
• SLAM implementation with ROS/Gazebo
• ROS debugging tools: rqt, roswtf
Path Planning and Navigation
Learn different Path Planning and Navigation algorithms. Then, combine SLAM and Navigation into a home service robot that can autonomously transport objects in your home!
Intro to Deep Rain Forcement Learning for Robotics
You will learn:
Q-Learning
Deep RL
DQN Lab
Deep RL Manipulator
Optional KUKA Path Planning
Optional Course Project
KUKA Path Planning
Students will apply what they have learned about ROS and path planning to search for a path and navigate a KUKA robot through a 2D maze.
Key Skills Demonstrated:
• Path planning
• Using C++ and Python with external ROS API
Request a detailed curriculum
What is a professional certificate?
Develop the skills necessary to complete the job
Whether you want to start a new career or change your current career, Coursera’s professional certificates help you prepare for the position. Learn at your own pace, at a time and place that is most comfortable for you. Enroll today and discover a new career with a 7-day free trial. You can pause your classes or end the subscription at any time.
Practical projects
Apply your skills to practical projects and develop a portfolio that demonstrates your job readiness to potential employers. You will need to finish the projects correctly to get your certificate.
Get a professional credential
When you complete all the courses in the program, you earn a certificate that you can share with your professional network, as well as access to professional support resources to help you start your new career. Many professional certificates have partners interested in hiring staff who recognize the professional certificate credential, and others can help you prepare for the certificate exam. You can see more information on the pages of the particular professional certificate where it applies.

| Program Offer | It includes |
|---|---|
| Real world projects | Yes |
| STUDENT SERVICES | |
| Mentor Tech Support | Yes |
| Student community | Yes |
| CAREER SERVICES | |
| CV support | Yes |
| Freelance Projects | Yes |
Practical Playground
Experiment and practice quickly in the interactive online playground
Real World Project
Develop an End-to-End project that will allow you to interact in a real work environment.
All the materials of the course are available, so that you can take the course at your own pace.
- Follow the suggested syllabus week by week. Just start watching the videos.
- Check FAQ if you have problems
- If you can’t find a solutionto your problem in FAQ, ask for help in Slack

English
Subtitles: All languages
Aug 19, 2024
Aug 15, 2024
Certificate to share
100% online
Get started right away and learn at your own pace.
Level
Intermediate – Advanced
GET STARTED
Robotic Bootcamp
MONTHLY ACCESS
- 7 days free trial
-
Affordable programs and free trial for 7 days.
-
Maximum flexibility to learn at your own pace.
-
Cancel anytime.
4 MONTHS ACCESS
- Visit an individual course or Specialization page to purchase.
-
Access all the courses included in the learning program
-
Get a certificate upon completion
-
Cash, credit/debit card, Paypal payment
Ready to become a robotic engineer? Apply now
Spots are limited, and we accept qualified applicants on a first-come, first-served basis. Start your free application
Get started
✓ Dictated by the most important companies and universities.
✓ Apply your skills in practical projects
✓ Learn at your own pace
✓ Videos and course readings
✓ Graded tests and assignments
✓ Many programs do not require a degree or experience
✓ Certificate that can be shared after completion
To share in LinkedIn
Related Programs
Asynchronous Program
This comprehensive course not only explores the fascinating world of robotics but also provides you with the essential mathematical and algorithmic foundations for designing, controlling, and making robots move intelligently and safely.
Level: Beginner
Asynchronous Program
Welcome to the future of robotics! This course is designed to take you from a curious developer to a skilled Robotics Software Engineer. Using ROS 2 (the industry-standard Robot Operating System), you will bridge the gap between code and physical movement by building a real autonomous machine.
Level: Intermediate
Asynchronous Program
This course provides a comprehensive introduction to the Robot Operating System (ROS) and C++ programming for robotics. You’ll learn how to set up a ROS environment, create custom nodes, and write efficient algorithms.
Level: Intermediate
FAQ
If you are subscribed, you get a 7-day free trial, which you can cancel whenever you want without any type of penalty. After that time, we do not issue refunds. However, you can cancel your subscription whenever you want. See our full refund policy .
Yes! To get started, click on the card of the course you are interested in and sign up. You can enroll and complete the course to obtain a certificate that you can share, or you can access the course as a listener to view the course materials for free. When you subscribe to a course that is part of a Certificate, you automatically subscribe to the entire Certificate. Visit the student dashboard to track your progress.
New jobs from companies around the world are posted every week.
Companies accept and validate the certificates obtained in Bootcamp AI.